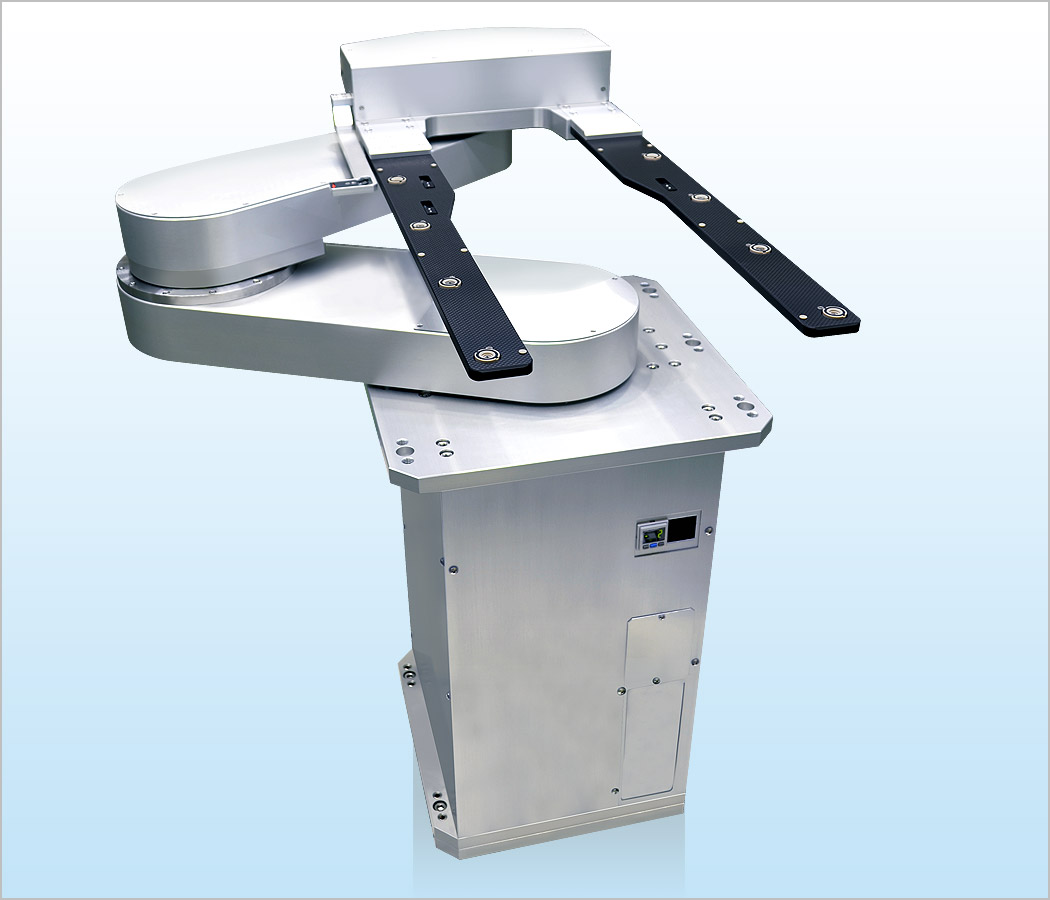
半導体搬送ロボット
JCR4400(PLP対応自動アライメント機能付ロボット)4軸水平多関節型クリーンロボット
環境と仕様
製品概要
- モデル名
- JCR4400
- 設置環境
- クリーンルーム内大気
- アーム
- シングルアーム
- 到達距離
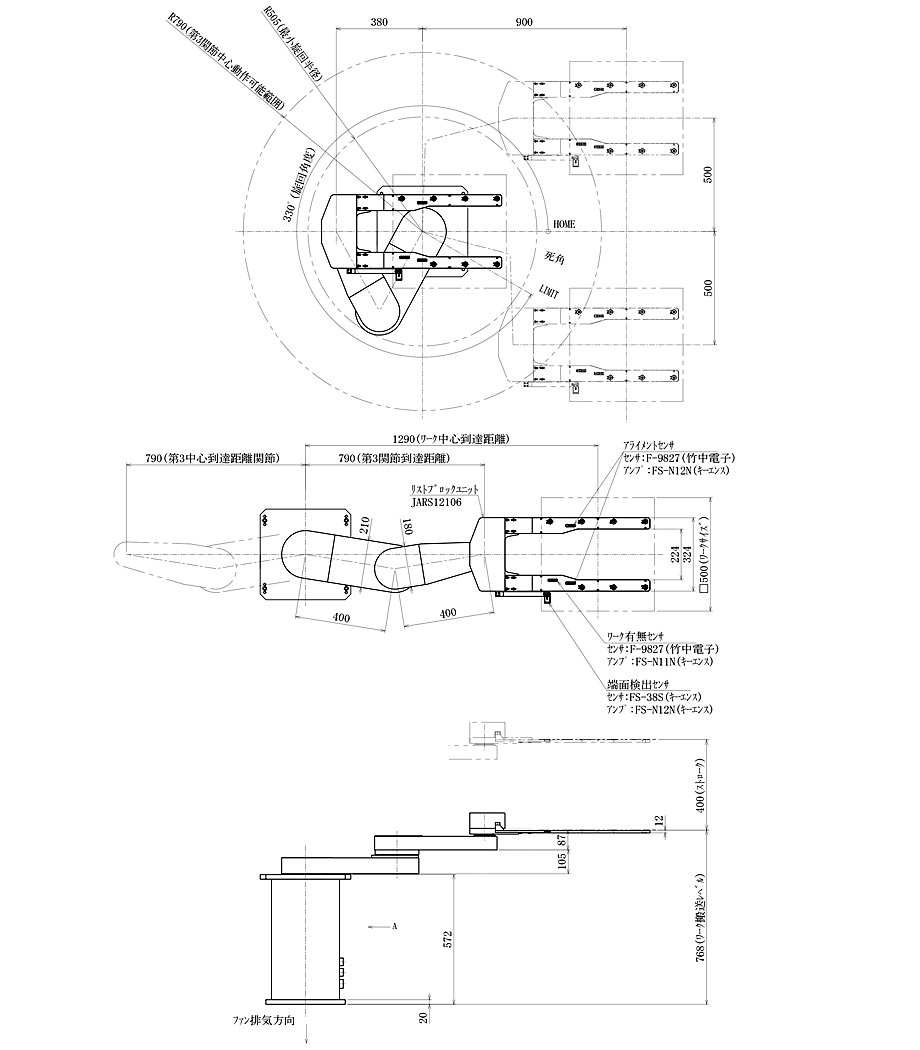
- 1290 mm (ワーク中心到達距離)
- 昇降距離
- 400 mm
- 可搬質量
- 10 kg (第3関節換算)
製品動画
製品型式一覧
| JCR4400-400-AM | 400 mm |
|---|
製品特徴
PLP対応自動アライメント機能付4軸水平多関節型クリーンロボットです。
- 並行配置のレイアウトへのアクセス可能
- 非接触アライメントにより、高精度に搬送可能
- 可搬質量10kgに対応
標準仕様
| ロボット仕様 | |
|---|---|
| ロボット型式 | JCR4400-400-AM |
| 被搬送物 | 500 mm x 500 mm 基板 |
| ウェーハ保持方式 | チャックによる真空吸着で保持 |
| 機械構造形式 | 水平多関節型 |
| 制御軸 | 4軸 |
| モータタイプ | ACサーボモータ |
| 動作範囲 |
ワーク中心到達距離:1290 mm 旋回角度(θ軸):330度 上下ストローク(Z軸):400 mm |
| 搬送速度 |
アーム(R軸):1170 mm/1.6 sec(円筒動作時) 旋回角度(θ軸):330度/1.5 sec 上下ストローク(Z軸):400 mm/1.4 sec |
| 分解能 |
第1関節軸(J1軸):3.5x10-3度 第2関節軸(J2軸):1.8x10-3度 第3関節軸(J3軸):1.8x10-3度 Z軸(J4軸):2.4x10-3度 |
| 繰り返し精度 | ±0.2 mm以内 |
| クリーン度 | ロボット本体:0.3 µm/cf クラス10(駆動部排気時) |
| ユーティリティ |
電源:単相 AC200V±10% 4 kVA 真空:-53 kPa以上 |
| 質量 | ロボット本体 約120 kg |
| コントローラ仕様 | |
| コントローラ型式 | C5000Sシリーズ |
| インタフェース | RS232C, パラレルフォトI/O |