設定2:カセット最上段目の設定(WHI設定)
- コマンド
- [$][B#][W][H][I][DEC][CR]
(ロボットが$1の場合、$1WHI****) - [DEC]
- ティーチングボックスに表示しているZ軸値を入力してください
- [無/DEC]
- 現在設定されているデータの取得/設定するデータ
1. カセット際上段目のワークを検出したポジションにロボットをティーチングしてください。
2. ロボットを移動させたらティーチングボックスのドットボタン [·] を押し、マッピング(ワークサーチ)センサ光源をONにしてください。(※仕様により異なります。詳細は取扱説明書を参照してください。)
3. ティーチングボックスで最上段ワークの厚み中心のZ軸値を確認し(図1参照)、その値を設定します(図2参照)。
4. 位置データの設定はシリアル通信で行ないます。
-
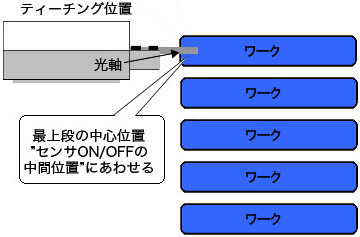
図1
-
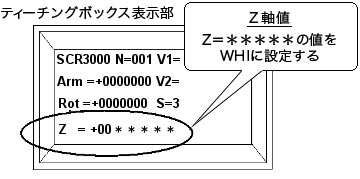
図2