ガラス基板搬送ロボット
LTHR4400C (ガラス基板対応)4軸円筒座標型クリーンロボット

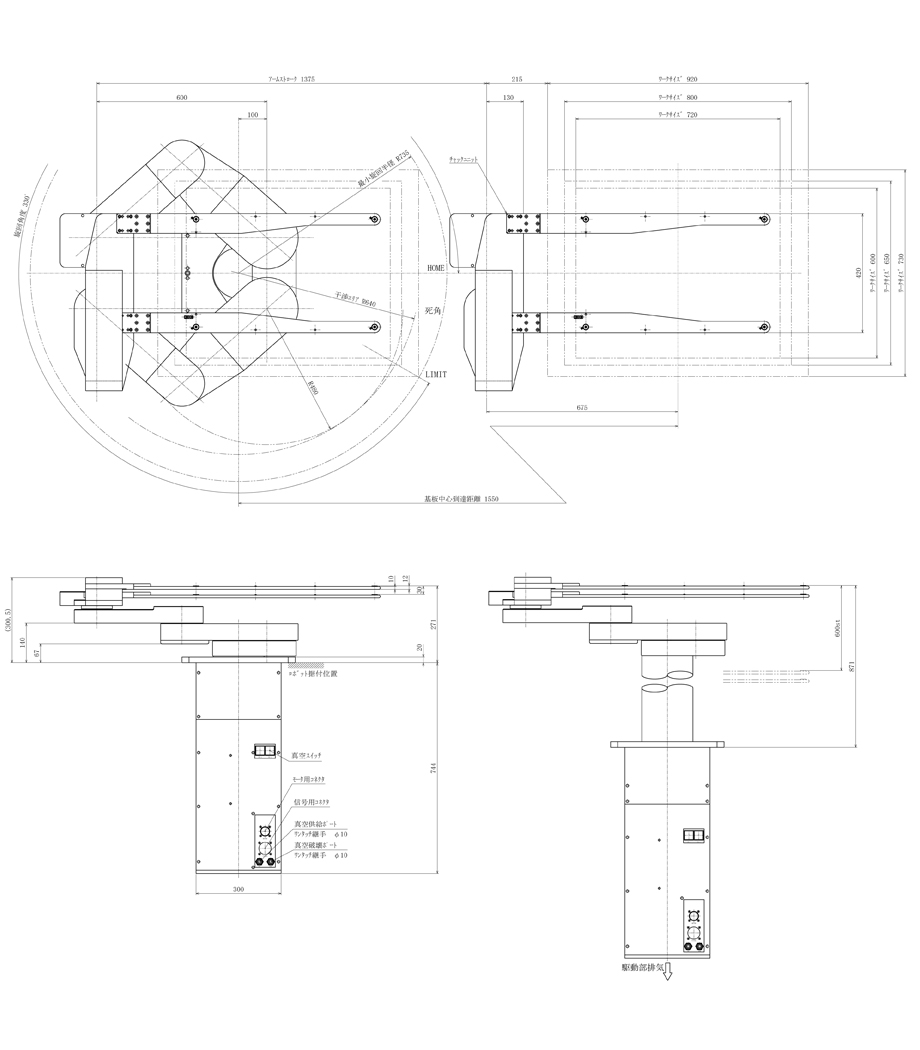
画像はLTHR4400C-600-AMです
(Z軸760 mm以上は多段式の為、外観が変わります)
環境と仕様
製品概要
- モデル名
- LTHR4400C
- 設置環境
- クリーンルーム内大気:温度 15℃〜40℃
※真空ロボットの場合…真空チャンバ内温度: 15℃〜50℃以下 - アーム
- ツインアーム
- 到達距離
- 1550 mm (ワーク中心到達距離)
- 昇降距離
- 400 mm / 500 mm / 600 mm
760 mm / 900 mm - 可搬質量
- 15 kg (第3関節換算)
製品型式一覧
| 型式と昇降距離(mm) | |
|---|---|
| LTHR4400C-400-AM | 400 mm |
| LTHR4400C-500-AM | 500 mm |
| LTHR4400C-600-AM | 600 mm |
| LTHR4400C-760-AM | 760 mm |
| LTHR4400C-900-AM | 900 mm |
製品特徴
ガラス基板対応4軸円筒座標型クリーンロボットLTHR4000シリーズです。
液晶製造装置内、検査装置等のガラス基板の搬送に適しています。
G4世代までのガラス基板に対応し、OLEDなどの搬送としても使用できます。
Zストローク760 mm以上はZ軸が多段式の為、低パスライン化が可能です。
アブソリュートエンコーダ仕様のサーボモータを使用しており、原点復帰が不要です。
- クリーン対応:真空ラインには0.1 µmメッシュフィルタ装備
- ツインアーム採用により、基板入替え時間の短縮ができ、タクトタイムの向上が可能
- 装置レイアウトに合わせベースタイプ、フランジタイプの選択可能
- 動作モニター装備
- 制御方式:RS232C及びパラレルフォトI/O
- 全軸ACサーボモータ使用
- S字加減速制御によりガラス基板を高速、高精度に搬送
- チャック材質はCFRP、アルミニウム、セラミクス等各種対応可能
- ハンド部には各種センサ取付可能
(アライメント、有無、マッピング等) - 被搬送物、装置レイアウトに合わせた最適チャックでの対応可能
標準仕様
| ロボット仕様 | |
|---|---|
| ロボット型式 | LTHR4400C-600-AM |
| 被搬送物 | 730×920×1.1 mm ガラス基板(代表例) |
| 機械構造形式 | 円筒座標型 |
| 制御軸 | 4軸 |
| モータタイプ | ACサーボモータ |
| 動作範囲 | ワーク中心到達距離:1550 mm 旋回角度(θ軸):330度 上下ストローク(Z軸):600 mm |
| 搬送速度 | アーム(R軸):1375 mm/1.8 sec 旋回角度(θ軸):180度/1.8 sec 上下ストローク(Z軸):600 mm/1.7 sec |
| 分解能 | アーム(R軸):8.20 µm以下 旋回角度(θ軸):0.0008度 上下ストローク(Z軸):2.4 µm以下 |
| 搬送レベル | 271 mm(フランジ取付面より上チャックの搬送面まで) |
| 繰り返し精度 | ±0.2 mm以内 |
| クリーン度 | 0.3 µm クラス10(駆動部排気時) |
| ユーティリティ | 電源:三相 AC200V±10% 3kVA 真空:-73kPa以上 |
| コントローラ仕様 | |
| コントローラ型式 | C5000Sシリーズ |
| インタフェース | RS232C及びパラレルフォトI/O |