アライナ
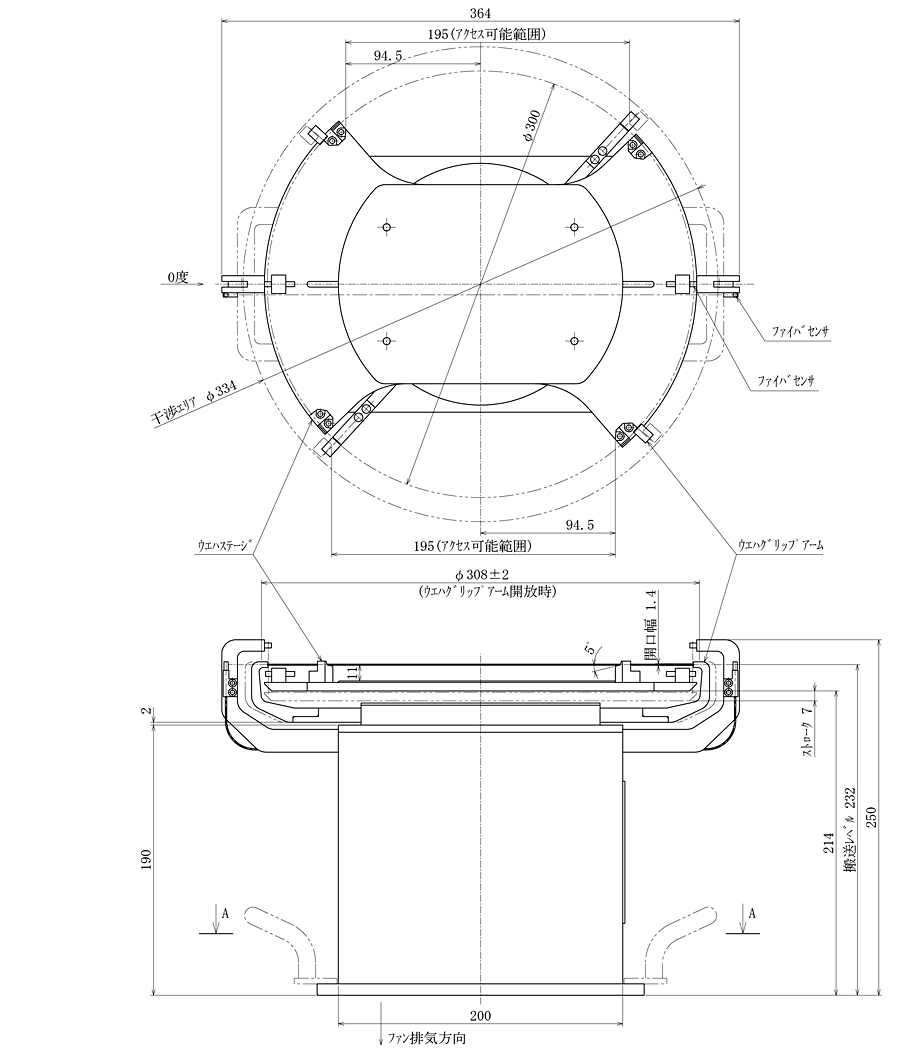
SAL20C1(エッジグリップ仕様)ウェーハ用アライナ

環境と仕様
製品概要
- 製品型式
- SAL20C1
- 設置環境
- クリーンルーム内大気
- 被搬送サイズ
- 300 mm
- 被搬送物
- シリコンウェーハ
製品動画
製品特徴
半導体製造装置内、検査装置等のウェーハの位置決めを必要とする搬送に対応します。
エッジグリップ方式を採用しウェーハへの接触を最小限にすることが可能です。
※ノッチサーチ後、指定位置へノッチを移動する為、持ち直し動作が入っています。
- エッジグリップ方式でシリコンウェーハのセンタリング・ノッチを高速、高精度に位置決め
- 摩擦滑りなどによるコンタミネーションの付着を抑える設計
- 制御方式:RS232C及びパラレルフォトI/O
標準仕様
| ロボット仕様 | |
|---|---|
| 被搬送物 | 300 mm シリコンウェーハ |
| 位置決め時間 | ノッチサーチ 2.5 sec (持ち直し無しの場合) |
| 位置決め精度 | センタリング:±0.3 mm以内 ノッチロケート:±0.3度以内 |
| センサ | 透過式LEDセンサ |
| クリーン度 | 0.1 µm/cf クラス1(駆動部排気時) |
| 駆動方式 | 2相ステッピングモータ2軸使用 モータドライバ, コントローラ内蔵 |
| ユーティリティ | 電源:DC24V±10% 2A |