半導体搬送ロボット
SVCR3330S(サセプタ・トレイ搬送仕様)3軸円筒座標型クリーンロボット

環境と仕様
製品概要
- モデル名
- SVCR3330S
- 設置環境
- クリーンルーム内真空
- アーム
- シングルアーム
- 到達距離
- 640 mm (第3関節中心距離)
- 昇降距離
- 60 mm
- 可搬質量
- 10 kg以下 (第3関節換算)
製品型式一覧
| 型式と昇降距離(mm) | |
|---|---|
| SVCR3330S-060-PM | 60 mm |
製品動画
※画像及び動画はSVCR3330S-060-PMです
製品特徴
真空対応3軸円筒座標型ロボットです。
真空チャンバ内で4 kg以下のトレイをツインチャックでの搬送に使用できます。
トランスファチャンバの中心に配置し、各処理室へのウェーハの受渡しができます。
従来型LVHRに比べコストパフォーマンスに優れます。
- アーム関節部には、磁性流体シール装備
- 真空シール:磁性流体シール及びベローズ使用
- クリーン対応:アーム内排気用に5µmメッシュフィルタ装備
- 動作モニター装備
- 制御方式:RS232C及びパラレルフォトI/O
- 全軸2相ステッピングモータ使用
- S字加減速制御によりウェーハを高速、高精度に搬送
- モータ仕様としてサーボモータ仕様も選択可能
- チャック材質はCFRP、アルミニウム、セラミクス等各種対応可能
- ウェーハ保持:落し込み、自重グリップチャック
- 被搬送物、装置レイアウトに合わせた最適チャックでの対応可能
標準仕様
| ロボット仕様 | |
|---|---|
| ロボット型式 | SVCR3330S-060-PM |
| 被搬送物 | 342 mmトレイx2(代表例) |
| ウェーハ保持方式 | 落とし込み/自重グリップ |
| 機械構造形式 | 円筒座標型 |
| 制御軸 | 3軸 |
| モータタイプ | 全軸2相ステッピングモータ |
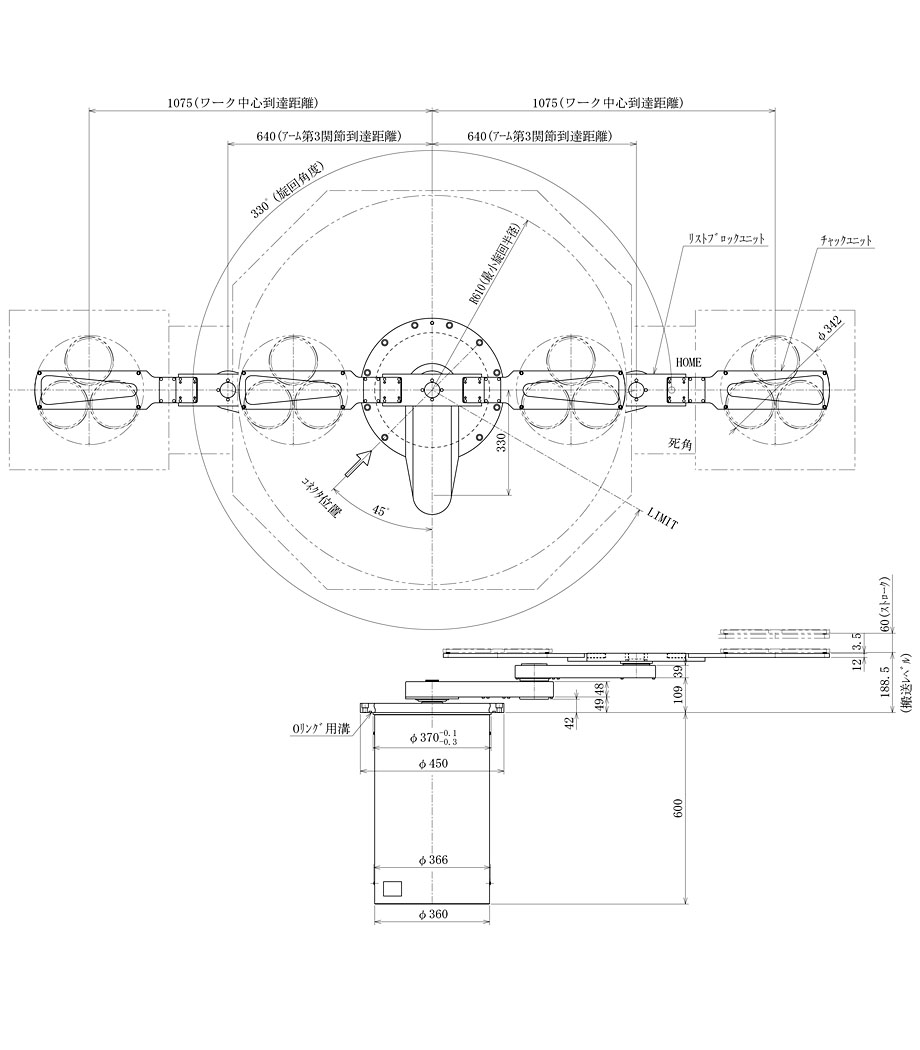
| 動作範囲 | ワーク中心到達距離:1075 mm 旋回角度(θ軸):330度 上下ストローク(Z軸):60 mm |
| 搬送速度(平均) | アーム(R軸):250 mm/sec 旋回角度(θ軸):90度/sec 上下ストローク(Z軸):30 mm/sec |
| 搬送速度(最高) | アーム(R軸):380 mm/sec 旋回角度(θ軸):135度/sec 上下ストローク(Z軸):45 mm/sec |
| 分解能 | アーム(R軸):65µm以下 旋回角度(θ軸):0.0056度 上下ストローク(Z軸):2.777µm |
| 繰り返し精度 | ±0.2 mm以内 |
| 搬送レベル | 188.5 mm(フランジ取付面よりチャックの取付面まで) |
| クリーン対策 | 磁性流体シール及びフィルタにより対策 |
| 耐真空度 | 1.33×10-6Pa |
| ユーティリティ | 電源:DC24V±10% 11A |
| コントローラ仕様 | |
| コントローラ型式 | C4000シリーズ |
| インタフェース | RS232C, パラレルフォトI/O |
オプション
チャックユニット
※当社標準以外のチャックユニットは下記アイテムをクリックするとご覧頂けます。
その他のオプション
※仕様により上記ティーチングボックスが使用できない場合があります。