オプション
ベルヌーイチャック(接触タイプ)

製品動画
製品特徴
反りのあるウェーハ、薄物ウェーハに対応し、コストパフォーマンスに優れたベルヌーイチャックです。
弊社の大気環境用搬送ロボットであればどのタイプのロボットにも搭載可能です。
サンプルウェーハによる検証を行い、お客様の任意の形状で各種サイズ、反り量、ウェーハ厚みに対応した設計を行います。
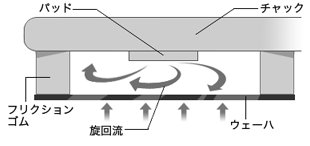
基板に対してベルヌーイの力でワークを吸引します。
搬送時のズレを防止する為にフリクションゴムの摩擦力で保持します。
チャック側の面は接触をしますが、ウェーハサイズが異なる場合に兼用(※組合せにより、できない場合があります)することができ、非接触タイプと比較してチャックの厚みを薄く作ることが可能です。
吸引がベルヌーイの為、真空吸着チャックよりも広いエリアに力がかかり、薄物ウェーハに有効です。
※チャックは、ワークを搬送するためにロボットのアーム部先端に取り付けるもので、ワークに適した様々な形状及び材質があります。チャックは、別名でロボットハンドやエンドエフェクタとも呼ばれています。
標準仕様
| 材質 | アルミ |
|---|---|
| 表面処理 | 黒アルマイト |
| ウェーハ保持方式 | サイクロンパッドによる吸引とフリクションゴム(H-NBR)による保持 (接触部材質は各種製作可能) |
| ユーティリティ | 30〜80 L/min(ワークサイズ、厚みにより異なります) |