ガラス基板搬送ロボット
LVHR3440S (ガラス基板対応)3軸円筒座標型真空ロボット

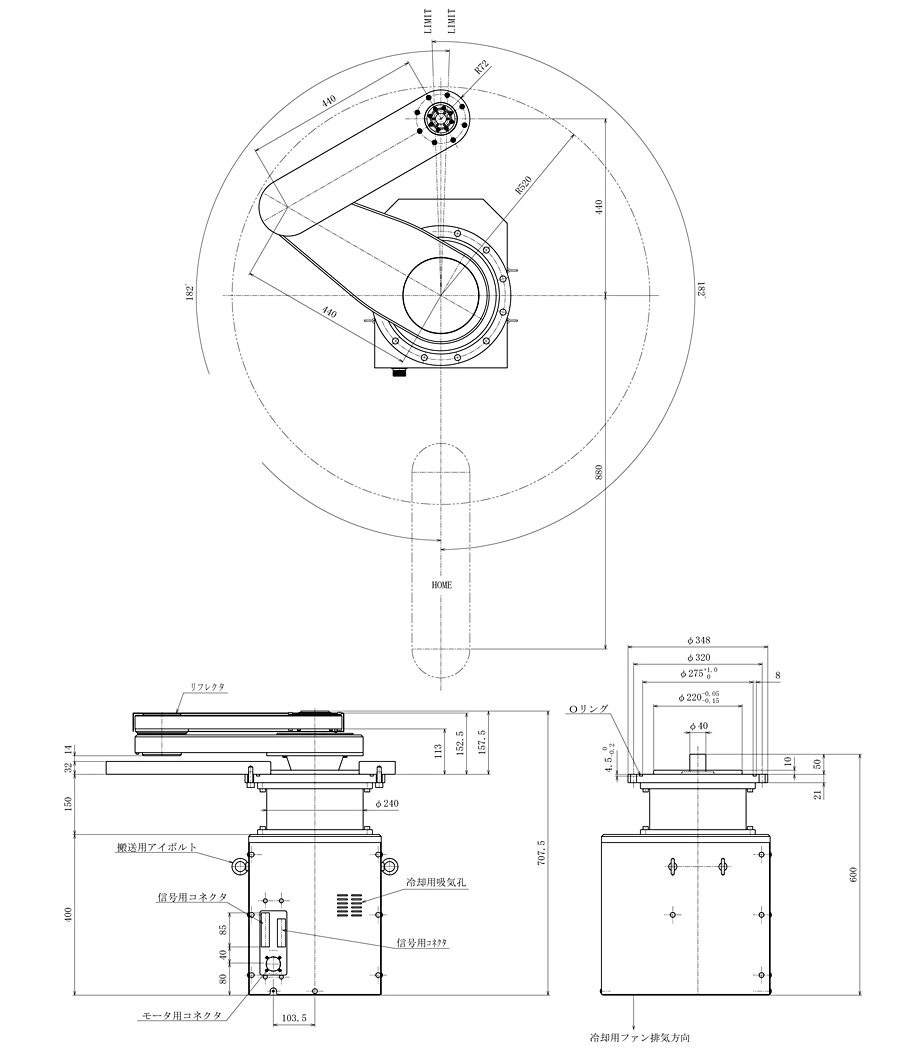
画像はLVHR3440S-040-SMです
環境と仕様
製品概要
- モデル名
- LVHR3440S
- 設置環境
- クリーンルーム内大気:温度 15℃〜40℃
※真空ロボットの場合…真空チャンバ内温度: 15℃〜50℃以下 - アーム
- シングルアーム
- 到達距離
- 880 mm (第3関節中心距離)
- 昇降距離
- 20 mm/ 32 mm/ 40 mm/ 60 mm/ 320 mm
- 可搬質量
- 10 kg以下 (第3関節換算)
製品型式一覧
| 型式と昇降距離(mm) | |
|---|---|
| LVHR3440S-020-SM | 20 mm |
| LVHR3440S-032-SM | 32 mm |
| LVHR3440S-040-SM | 40 mm |
| LVHR3440S-060-SM | 60 mm |
| LVHR3440S-320-SM | 320 mm |
製品特徴
ガラス基板対応の3軸円筒座標型真空対応クリーンロボット LVHR3000シリーズです。
上下軸によって処理室側のリフトアップ・ダウン動作が不要となり、処理室が多い場合には装置のコストダウンに貢献します。
マルチトランスファチャンバなどで多く使用されています。
液晶製造装置内、検査装置等のガラス基板の搬送に適しています。
- 可搬質量:第3関節にて10 kg以下
- アーム関節部には磁性流体シール装備
- 真空シール:磁性流体シール及びベローズ使用
- クリーン対応:アーム内排気用に5µmメッシュフィルタ装備
- 動作モニター装備
- 制御方式:RS232C及びパラレルフォトI/O
- 全軸ACサーボモータ使用
- S字加減速制御によりガラス基板を高速、高精度に搬送
- チャック材質はCFRP、アルミニウム、セラミクス等各種対応可能
- 被搬送物、装置レイアウトに合わせた最適チャックでの対応可能
標準仕様
| ロボット仕様 | |
|---|---|
| ロボット型式 | LVHR3440S-040-SM |
| 被搬送物 | 730×920×1.1 mm ガラス基板(代表例) |
| 機械構造形式 | 円筒座標型 |
| 制御軸 | 3軸 |
| モータタイプ | ACサーボモータ |
| 動作範囲 | アーム第3関節中心:880 mm 旋回角度(θ軸):±182度 上下ストローク(Z軸):40 mm |
| 搬送速度 | アーム(R軸):1320 mm/2.7 sec 旋回角度(θ軸):180度/1.8 sec 上下ストローク(Z軸):40 mm/2.0 sec |
| 分解能 | アーム(R軸):13.5µm以下 旋回角度(θ軸):0.00097度 上下ストローク(Z軸):0.61 µm以下 |
| 搬送レベル | 168.5 mm(フランジ取付面より上チャックの搬送面まで) |
| 繰り返し精度 | ±0.2 mm以内 |
| クリーン対策 | 磁性流体シール及びフィルタにより対策 |
| 耐真空度 | 1.33×10-6Pa |
| ユーティリティ | 電源:単相 AC200V±10% 2 kVA |
| コントローラ仕様 | |
| コントローラ型式 | C5000Sシリーズ |
| インタフェース | RS232C及びパラレルフォトI/O |
オプション
チャックユニット
※当社標準以外のチャックユニットは下記アイテムをクリックするとご覧頂けます。