半導体搬送ロボット
STCR4160S(ツインアーム反転機構付)4軸円筒座標型クリーンロボット

環境と仕様
製品概要
- モデル名
- STCR4160S
- 設置環境
- クリーンルーム内大気
- アーム
- ツインアーム
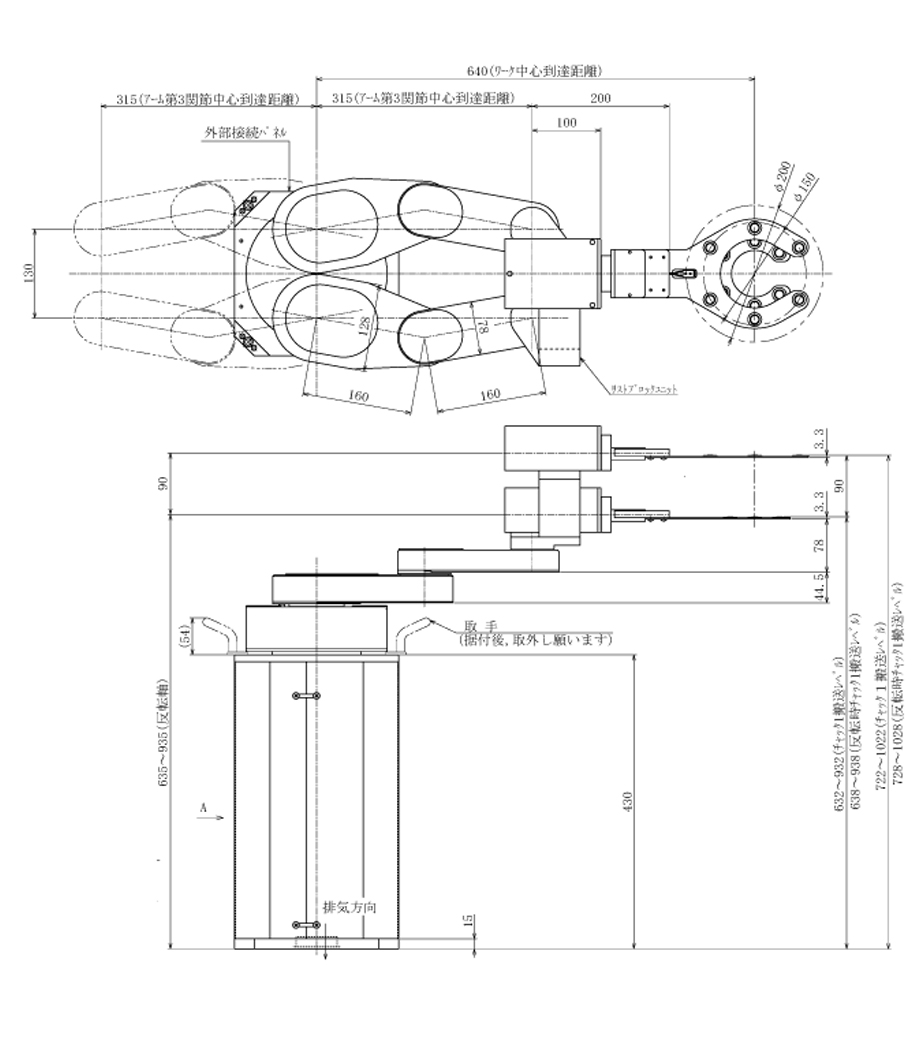
- 到達距離
- 315 mm (第3関節中心距離)
- 昇降距離
- 200 mm / 300 mm / 400 mm / 450 mm / 500 mm / 550 mm / 600 mm
- 可搬質量
- 3 kg (第3関節換算)
製品型式一覧
| 型式と昇降距離(mm) | |
|---|---|
| STCR4160S-200-PM | 200 mm |
| STCR4160S-300-PM | 300 mm |
| STCR4160S-400-PM | 400 mm |
| STCR4160S-450-PM | 450 mm |
| STCR4160S-500-PM | 500 mm |
| STCR4160S-550-PM | 550 mm |
| STCR4160S-600-PM | 600 mm |
製品動画
※動画はSTCR4160S-300-PM(ツインアーム反転機構付)です
製品特徴
薄物等の吸着で保持することが困難なウェーハの搬送ができます。
反転軸を設けることにより、ウェーハの表裏を装置側で反転させるステージなしでの反転ができます。
ベルヌーイチャックを使用しているため、処理ステージにあるウェーハを上面側から取り出すことができます。
- 薄物ウェーハをジェーイーエル製ベルヌーイ・チャックを使用し保持
- 可搬質量: アーム第3関節換算3 kg(チャック、ワーク含む)の高剛性
- ステッピングモータを採用し、消費電力を抑えた省エネ設計
- ツインアーム採用により、ウェーハ交換時間の短縮
- 両アームともに反転機構付き
- 装置レイアウトに合わせてベースタイプ、フランジタイプの選択可能
標準仕様
| ロボット仕様 | |
|---|---|
| ロボット型式 | STCR4160S-300-PM |
| リストブロック | SART08674 |
| チャック | ベルヌーイチャック |
| 被搬送物 | 150 mm, 200 mmウェーハ |
| ウェーハ保持方式 | サイクロンパッドによる吸引とフリクションゴムによる保持(接触部材質は各種製作可能) |
| 機械構造形式 | 円筒座標型 |
| 制御軸 | 4軸 |
| モータタイプ | ステッピングモータ |
| 動作範囲 | ワーク中心到達距離:640 mm 旋回角度(θ軸):340度 上下ストローク(Z軸):300 mm |
| 搬送速度(平均) | アーム(R軸):500 mm/sec 旋回角度(θ軸):180度/sec 上下ストローク(Z軸):200 mm/sec |
| 搬送速度(最高) | アーム(R軸):1230 mm/sec 旋回角度(θ軸):300度/sec 上下ストローク(Z軸):250 mm/sec |
| クリーン度 | ISOクラス2(駆動部排気時) |
| ユーティリティ | 電源:DC24V±10% 16A 正圧エア:60SLM以上×2系統 0.1〜0.3 MPa |
| 質量 | ロボット本体 約30 kg |
| コントローラ仕様 | |
| コントローラ型式 | C4000シリーズ |
| インタフェース | RS232C及びパラレルフォトI/O |
オプション
リストブロックユニット
| 型式 | リストブロック長 | マッピングセンサ | 取付チャック厚 |
|---|---|---|---|
| SART08674 | 60 mm | 2 mm |
※上記は当社標準リストブロックユニットの仕様です。表にない仕様にも対応可能です。
※当社標準以外のリストブロックユニットは下記アイテムをクリックするとご覧頂けます。
チャックユニット
※当社標準以外のチャックユニットは下記アイテムをクリックするとご覧頂けます。
その他のオプション
※仕様により上記ティーチングボックスが使用できない場合があります。