半導体搬送ロボット
SWCR3160CS (防水対応)3軸円筒座標型クリーンロボット
環境と仕様
製品概要
- モデル名
- SWCR3160CS
- 設置環境
- クリーンルーム内大気
- アーム
- シングルアーム
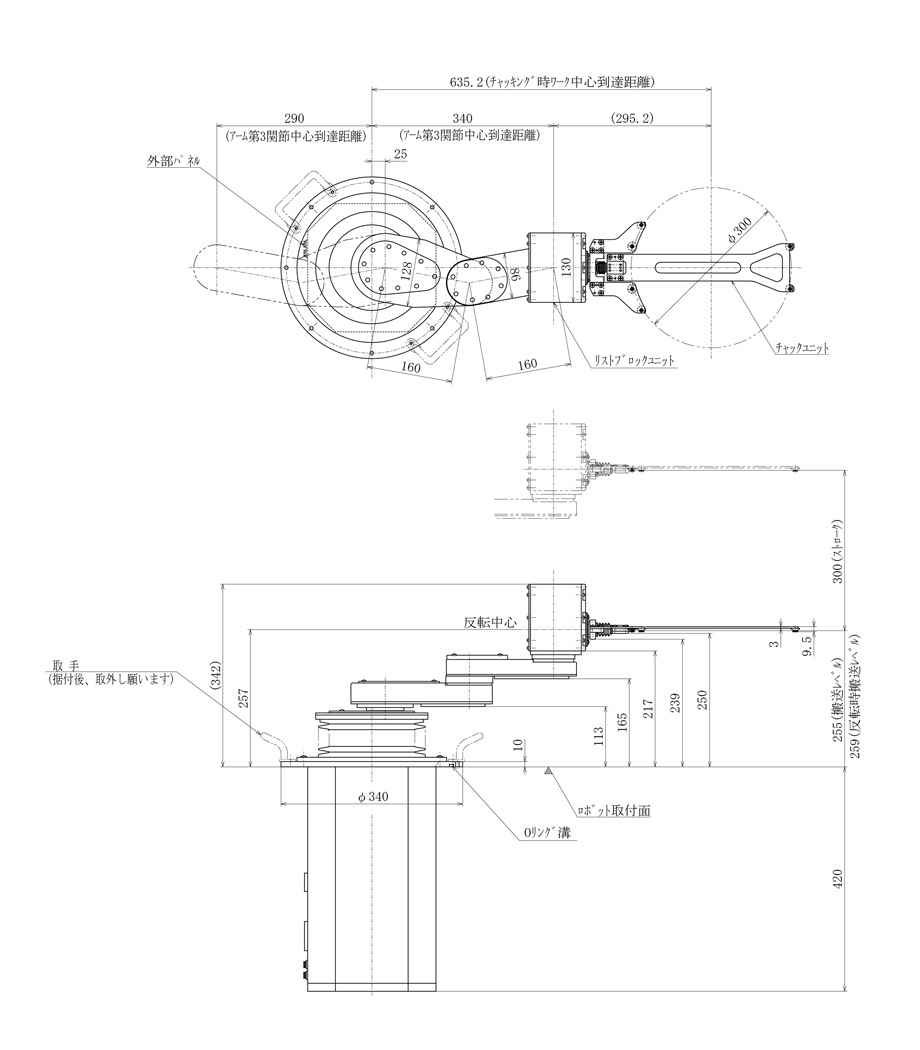
- 到達距離
- 312 mm (第3関節中心距離)
- 昇降距離
- 200 mm / 300 mm
- 可搬質量
- 3 kg以下(第3関節換算)
製品型式一覧
| 型式と昇降距離(mm) | |
|---|---|
| SWCR3160CS-200-PM | 200 mm |
| SWCR3160CS-300-PM | 300 mm |
製品動画
※画像、動画はSWCR3160CS-200-PMです
製品特徴
防水対応3軸円筒座標型ロボットのSWCRシリーズです(300 mmウェーハ対応反転+エッジグリップ機能付)。
水がかかる環境やぬれたウェーハを搬送することができます。
薬液などのため人が入れずウェーハを触ることができない環境でのウェーハ搬送ができます。
保護等級IP64 LSI製造プロセスにおける、酸・アルカリの雰囲気中のウェーハ搬送に適しています
- アーム部は、テフロンコーティングにより耐蝕性を確保
- アーム関節部防水構造にVシール使用
- 部品の接合部はバイトンパッキンによりシール
- Z軸部防水構造にジャバラ使用
- 動作モニター装備
- 制御方式:RS232C及びパラレルフォトI/O
- 全軸2相ステッピングモータ使用
- S字加減速制御によりウェーハを高速、高精度に搬送
- ウェーハ保持:真空吸着、落し込み、エッジグリップチャック
- 被搬送物、装置レイアウトに合わせた最適チャックでの対応可能
標準仕様
| ロボット仕様 | |
|---|---|
| 被搬送物 | ~300 mmウェーハ |
| 機械構造形式 | 円筒座標型 |
| 制御軸 | 3軸 |
| モータタイプ | 2相パルスモータ |
| 動作範囲※ | アーム第3関節中心:312 mm 旋回角度(θ軸):340度 上下ストローク(Z軸):300 mm |
| 搬送速度(平均)※ | アーム(R軸):250 mm/sec 旋回角度(θ軸):120 度/sec 上下ストローク(Z軸):70 mm/sec |
| 搬送速度(最高)※ | アーム(R軸):500 mm/sec 旋回角度(θ軸):160度/sec 上下ストローク(Z軸):85 mm/sec |
| 分解能※ | アーム(R軸):49µm以下 旋回角度(θ軸):0.0214度 上下ストローク(Z軸):12.5µm以下 |
| 繰り返し精度 | ±0.2 mm以内 |
| ユーティリティ | 電源:DC24V±10% 15A 正圧:0.15MPa |
| コントローラ仕様 | |
| コントローラ型式 | C4000シリーズ |
| インタフェース | RS232C及びパラレルフォトI/O |
オプション
チャックユニット
その他のオプション
※仕様により上記ティーチングボックスが使用できない場合があります。