設定7:マッピング(ワークサーチ)完了停止位置の設定(WEND設定)
- コマンド
- [$][B#][W][E][N][D][DEC][CR]
(ロボットが$1の場合、$1WEND****) - [DEC]
- 停止する位置までのパルスを入力してください。
- [無/DEC]
- 現在設定されているデータの取得/設定するデータ
マッピング(ワークサーチ)時の完了停止位置を設定します。完了停止位置の設定はシリアル通信で行ないます。
※仕様によりWENDコマンドが使用できない場合があります。
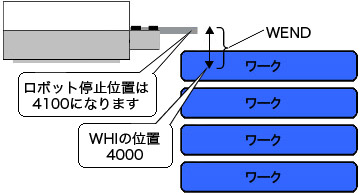
マッピング(ワークサーチ)完了停止位置は、設定2:カセット最上段目の設定(WHI設定)とマッピング(ワークサーチ)完了停止位置 の位置でマッピング(ワークサーチ)完了時にロボットが停止する位置です。
例:WHI=4000設定の場合
WEND=100設定にすると、マッピング(ワークサーチ)完了した時の停止位置は4100となります。
- 注意1
- WENDの値を大きくしすぎるとロボットがカセットなどに干渉する恐れがあります。
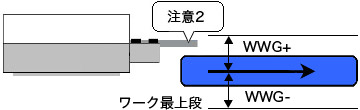
- 注意2
- WENDの値を小さくしすぎると6:ワーク検出ゲート幅の設定(WWG設定)範囲にかかり最上段のワーク検出が異常になる場合があります。