技術情報
ステッピングモータとサーボモータについて
当社ロボットの駆動用モータにはステッピングモータとサーボモータがあります。
ステッピングモータは半導体搬送ロボットのSCR3000シリーズ、STCR4000シリーズ、GCR4000-PM等に、サーボモータはMCR3000、MCR4000シリーズ、GCR4000-AMシリーズ、GTCR5000-AMシリーズ等に使用しています。
半導体ロボットにおいてもワークの質量や搬送方法に応じてサーボモータを使用します。
当社製品型式においてステッピングモータを使用したロボットへは「PM」(※1)を、
サーボモータを使用したロボットへは「AM」(※2)が表記されます。
-
(※1)GCR4210-300-PM(ステッピングモータ)
-
(※2)GCR4210-300-AM(サーボモータ)
ステッピングモータ
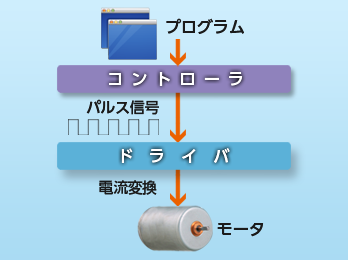
ステッピングモータはパルスモータとも呼ばれ、モータドライバ(モータを駆動・制御する装置) へ入力されるパルス信号に応じ、モータの回転軸が回転します。
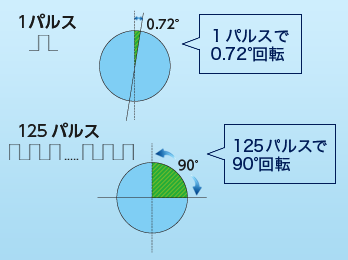
ステッピングモータ1パルスの入力に対し回転する軸の角度が決められており、例えば1パルスで0.72°回転するステッピングモータを90°回転させる場合125パルスの信号を入力します。
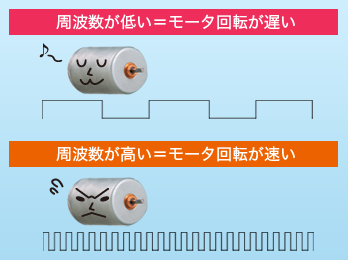
パルス信号の周波数に比例して回転速度が変化し周波数を高めるとモータ回転は速くなり、低くすると回転が遅くなります。
ステッピングモータの特徴
| 長所 |
|
|---|---|
| 短所 |
|
サーボモータ
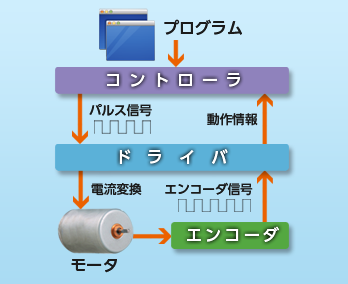
サーボモータはモータ軸の回転角度/回転速度を回転検出器(エンコーダ)で検出し、モータドライバへ フィードバックします。このフィードバックと先にモータドライバ入力される制御用の情報の差が0になるよう振舞います。 また、ステッピングモータに比べ細かな制御が行え、高速回転時にも高いトルクを維持できます。
サーボモータの特徴
| 長所 |
|
|---|---|
| 短所 |
|
ステッピングモータクローズドループ仕様
このステッピングモータとサーボモータの長所を備えたモータがクローズドループ制御です。
ジェーイーエルではクローズドループ仕様のステッピングモータについてもラインナップしております。