半導体搬送ロボット
GTCR5280(300 mmウェーハ搬送)5軸水平多関節型クリーンロボット

環境と仕様
製品概要
- モデル名
- GTCR5280
- 設置環境
- クリーンルーム内大気
- アーム
- シングルアーム
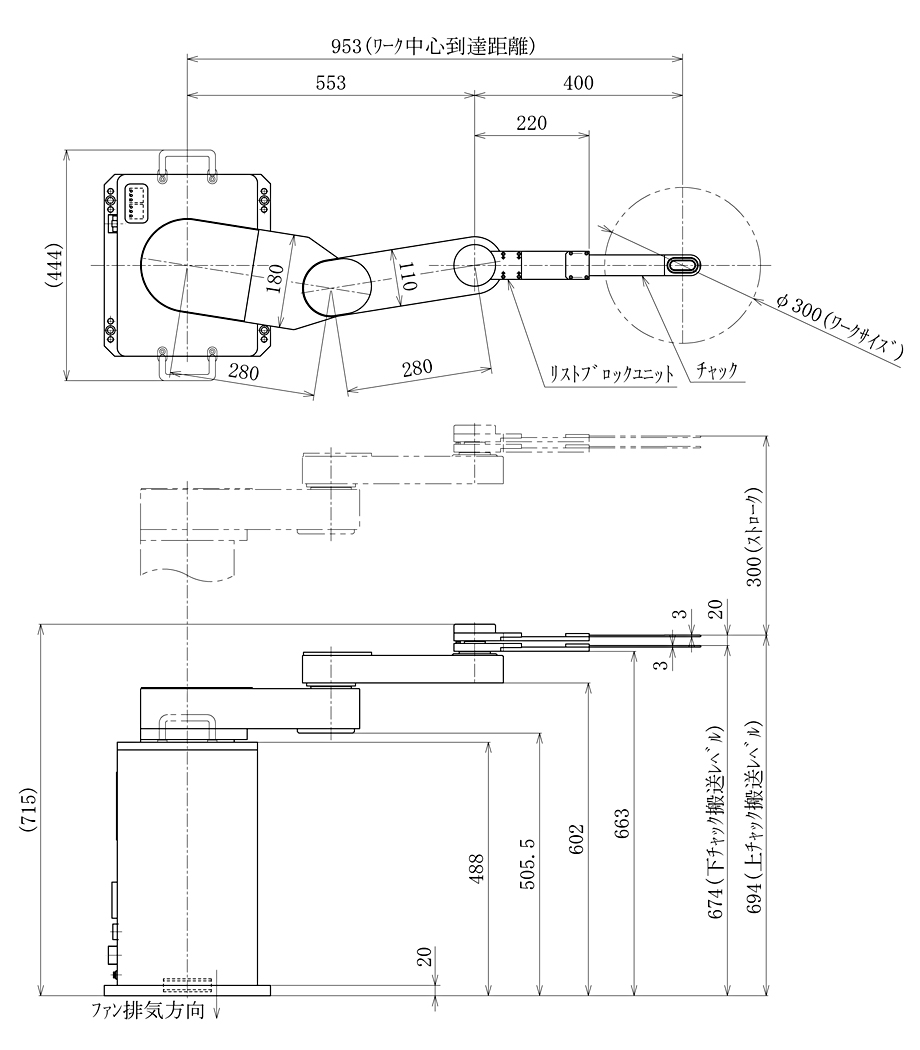
- 到達距離
- 553 mm (第3関節中心距離)
- 昇降距離
- 300 mm
- 可搬質量
- 4.0 kg (第3関節換算)
製品型式一覧
| 型式と昇降距離(mm) | |
|---|---|
| GTCR5280-300-AM | 300 mm |
製品動画
※動画はGTCR5280-300-AMです
製品特徴
300 mm対応の5軸水平多関節型クリーンロボット。
ツインチャックを搭載することでシングルアームでありながらツインアームの機能を確保。
300 mm対応の半導体製造装置内、検査装置等のウェーハ搬送に適しています。
アブソリュートエンコーダ仕様のサーボモータを使用しており、原点復帰が不要です。
- アームバリエーション: 210 mm、280 mm
- ロボットのみで2FOUP対応可能
- ツインチャック採用によりウェーハ交換時間の短縮
- シングルチャック仕様も選択可能
- 装置レイアウトに合わせベースタイプ、フランジタイプの選択可能
- 動作モニター装備
- 制御方式:RS232C及びパラレルフォトI/O
- 全軸アブソリュートエンコーダ内蔵ACサーボモータ使用
- S字加減速制御によりウェーハを高速、高精度に搬送
- ウェーハ保持:真空吸着、落とし込み、エッジグリップチャック、ベルヌーイチャック
- チャック材質はCFRP、アルミニウム、セラミックス等各種対応可能
- 被搬送物、装置レイアウトに合わせた最適チャックでの対応可能
標準仕様
| ロボット仕様 | |
|---|---|
| ロボット型式 | GTCR5280-300-AM |
| 被搬送物 | 〜300 mmウェーハ |
| ウェーハ保持方式 | チャックによる真空吸着で保持 |
| 機械構造形式 | 水平多関節型 |
| 制御軸 | 5軸 |
| モータタイプ | 全軸ACサーボモータ |
| 動作範囲 | ワーク中心到達距離:953 mm 旋回角度(θ軸):335度 上下ストローク(Z軸):300 mm |
| 搬送速度(平均) | アーム(R軸):833 mm/sec 旋回角度(θ軸):250度/sec 上下ストローク(Z軸):300 mm/sec |
| 繰り返し精度 | ±0.1 mm以内 |
| クリーン度 | ISOクラス2以下(ISO14644)(駆動部排気時) |
| ユーティリティ | 電源:単相AC200V±10% 2 kVA 真空:-53 kPa以上(吸着チャック取付の場合) |
| 質量 | ロボット本体 約50 kg |
| コントローラ仕様 | |
| コントローラ型式 | C5000Sシリーズ |
| インタフェース | RS232C, パラレルフォトI/O |
オプション
チャックユニット
| 型式 | 披搬送サイズ | チャック形状(チャック厚) | 保持方式 |
|---|---|---|---|
| SC-IW-200 | 3'',100 mm〜200 mm | I 型(2 mm) | 吸着保持 |
| SC-IW-240 | 3'',100 mm〜300 mm | I 型(2 mm) | 吸着保持 |
| SC-YW-200 | 100 mm〜200 mm | Y 型(2 mm) | 吸着保持 |
| SC-YW-227 | 100 mm〜300 mm | Y 型(2 mm) | 吸着保持 |
| SC-YW-240 | 100 mm〜300 mm | Y 型(2 mm) | 吸着保持 |
| 3D-02229 | 150 mm〜300 mm | Y 型(2 mm) | 吸着保持 |
| SC3-YW-240 | 300 mm | Y 型(3 mm) | 吸着保持 |
| 3D-01661 | 300 mm | Y 型(3 mm) | 吸着保持 |
| SC3-IW-240 | 300 mm | I 型(3 mm) | 吸着保持 |
※上記は当社標準チャックユニットの仕様です。表にない仕様にも対応可能です。
※当社標準以外のチャックユニットは下記アイテムをクリックするとご覧頂けます。